W każdej współczesnej fabryce mamy do czynienia z ruchem i jego kontrolą. Niezbędnym składnikiem każdej linii produkcyjnej, niezależnie od tego, czy rozpatrujemy produkcję słodyczy, samochodów, papieru, opakowań itp. są napędy elektryczne. Poza najprostszymi rozwiązaniami, polegającymi na bezpośrednim załączaniu/wyłączaniu silników elektronicznych do sieci zasilającej, gdzie silnik pracuje z prędkością nominalną podawaną na jego tabliczce znamionowej, w ogromnej ilości przypadków istnieje potrzeba kontroli i odpowiedniej regulacji ruchem wału silnika. W zależności od aplikacji możemy mieć do czynienia z prostą kontrolą prędkości, poprzez kontrolę momentu, aż po precyzyjną kontrolę pozycji czy synchronizację ruchu dwóch lub więcej współdziałających ze sobą napędów.
Wymusza to stosowanie różnych typów silników elektrycznych, od standardowych silników asynchronicznych, poprzez silniki synchroniczne, po silniki reluktancyjne. O ile silnik wraz z przekładnią mechaniczną możemy porównać do mięśni każdego układu napędowego, o tyle sercem, czy też bardziej precyzyjnie – mózgiem takiego układu jest przetwornica częstotliwości, czasem występująca w połączeniu z dodatkowym układem nadrzędnym, jakim jest sterownik PLC.
Zastosowanie różnych rodzajów silników elektrycznych wymusza zastosowanie wielu rodzajów przetwornic częstotliwości, często różnych producentów bądź z różnych rodzin w obrębie oferty jednego dostawcy. Powoduje to ból głowy działów utrzymania ruchu, który, aby zapewnić ciągłość procesu produkcyjnego, z jednej strony musi trzymać cały magazyn części zamiennych, a z drugiej znać się praktycznie na wszystkich rodzajach napędów i poznać różne specjalistyczne programy do parametryzacji, edycji i archiwizacji danych. Szczególnie uciążliwe jest to w przypadku wysoce specjalizowanych napędów servo. Tutaj czas poświęcony na zdobycie biegłości w praktycznym zastosowaniu takich napędów to wielotygodniowe szkolenia i długie godziny spędzone przy stole warsztatowym.
Rozwiązaniem jest zastosowanie przetwornic częstotliwości Danfoss serii VLT® AutomationDrive FC 302. Posiadają one algorytm sterowania zarówno silnikami asynchronicznymi, reluktancyjnymi, jak również synchronicznymi silnikami z magnesami trwałymi. Jedna i ta sama przetwornica zapewnia swobodę w doborze silnika, niezależnie od producenta. To samo środowisko programistyczne, te same części zamienne, łatwość i prostota w użytkowaniu, możliwość pracy z wszelkimi dostępnymi protokołami komunikacyjnymi i różnymi systemami sprzężeń — enkoderami inkrementalnymi, absolutnymi, resolverami. FC-302 zapewnia również pracę z silnikami PM bez sprzężenia zwrotnego.

Napędy Danfoss - niezależność i otwartość
Zintegrowany Sterownik Ruchu - Integrated Motion Controller (IMC)Ta idea ogromnej funkcjonalności i możliwości przy jednoczesnym zachowaniu maksymalnej prostoty i łatwości użytkowania przyświecała firmie Danfoss przy opracowywaniu nowego rozwiązania dla tych przetwornic – zintegrowanego sterownika ruchu IMC (Integrated Motion Control).
Od teraz wszędzie tam, gdzie istnieje zapotrzebowanie na kontrolę pozycji lub pracę synchroniczną napędów, a jednocześnie nie jest wymagana wysoka dynamika servo, może zostać zastosowana standardowa przetwornica częstotliwości Danfoss serii FC-302, dostępna z półki. W znaczącej części napędów spotykanych w rozwiązaniach przemysłowych napędy servo stosowane są nie ze względu na wysoką dynamikę i możliwość przeciążania, a jedynie dla ich precyzji i możliwości synchronizacji. Użytkownik końcowy wykorzystuje zaledwie niewielki ułamek ich możliwości, płacąc jednocześnie pełną cenę za całość. Kontrola nad takim napędem wymaga zastosowania wysoce specjalistycznego, zazwyczaj drogiego oprogramowania, którego nauka obsługi to wielogodzinne szkolenia i konieczność posiadania wieloletniego doświadczenia w technice napędowej. Dodatkowo aby podłączyć się do przetwornicy za pomocą komputera najczęściej trzeba zakupić specjalistyczny konwerter przetwarzający informacje do/z przetwornicy częstotliwości na zrozumiałe przez oprogramowanie laptopa. Zaś opracowanie samego rozwiązania napędowego w technologii servo, odpowiedni dobór silnika, przekładni, przetwornicy servo i późniejsze uruchomienie to proces czasochłonny, wymagający wysokiej klasy specjalisty z zaawansowaną wiedzą programistyczną.

Możliwość podłączenia sprzężenia zwrotnego w przetwornicach serii FC-302
Alternatywą dla napędów servo wszędzie tam, gdzie nie ma wymogu wysokiej dynamiki jest Danfoss VLT® AutomationDrive FC 302. Standardowa przetwornica częstotliwości, dostępna z półki, niewymagająca dodatkowego środowiska programistycznego. Funkcje pozycjonowania, synchronizacji czy homingu dostępne z poziomu panelu operatorskiego przetwornicy lub poprzez darmowe oprogramowanie MCT10, dokładnie to samo jak dla wszystkich serii standardowych przetwornic VLT Danfoss. Łatwe w obsłudze, intuicyjne i do opanowania przez każdego technika z minimalnym poziomem wiedzy o technice napędowej. Bardzo proste w parametryzacji i zastosowaniu – każdy automatyk umiejący zaprogramować typową przetwornicę jest w stanie zaprogramować tryby parametryzacji, synchronizacji czy homingu.
Podpięcie się do FC-302 nie wymaga żadnych dodatkowych zakupów – wystarczy zwykły kabel drukarkowy wpięty pod standardowo wbudowane w napęd złącze USB. Umożliwia to swobodną parametryzację napędu czy archiwizację danych.
Podstawowe informacje na temat zintegrowanego sterownika ruchu:
- Zintegrowany sterownik ruchu (IMC), oferuje pozycjonowanie jako alternatywę do kontroli prędkości i kontroli momentu.
- Pozycjonowanie jest dostępne w trybie Flux Sensorless, Flux w. motor feedback oraz U/F.
- Dostępne z silnikami indukcyjnymi oraz silnikami PM
- Dostępne są poniższe funkcje:
- Pozycjonowanie: Absolutne, Relatywne, Touch Probe
- Homing
- Synchronizacja: z fukcją przełożenia, offsetu, Virtual master
- Kontrola pozycji może być ze sprzężeniem lub bez sprzężenia:
- W kontroli bez sprzężenia obliczana pozycja wału (kąt) traktowana jest jako sygnał zwrotny
- W zamkniętej pętli sprzężenia FC 302 standardowo współpracuje z inkrementalnymi enkoderami HTL, inne enkodery czy resolver są dostępne poprzez opcję B. Opcję taką można swobodnie dołożyć w każdej chwili do posiadanej przetwornicy
- Możliwe jest podanie wartości zadanej poprzez magistralę komunikacyjną
- Kontrola pozycji może odbywać się liniowo lub rotacyjnie.
- Wartości pozycji mogą być wyskalowane w różnych jednostkach, m.in. mm lub stopnie.
W trybie pozycjonowanie napęd może poruszać wałem o zadany dystans (pozycjonowanie relatywne) lub do zadanego celu (pozycjonowanie absolutne). Pozycjonowanie wymaga trzech komend: zadanej pozycji, prędkości i zdefiniowania ramp ruchu.
Pozycjonowanie
Wartość zadana dla pozycji docelowej zależy od wybranego trybu pozycjonowania:
- absolutne - pozycja docelowa jest odniesiona do zdefiniowanego punktu 0,
- pozycja docelowa jest odniesiona do aktualnej pozycji maszyny
- pozycja docelowa jest odniesiona do sygnału z czujnika

Synchronizacja
- W trybie synchronizacji napęd podrzędny, tzw. follower, podąża za pozycją układu nadrzędnego, tzw. mastera.
- Sygnał mastera może być zdefiniowany jako zewnętrzny sygnał zadany np. z enkodera, lub poprzez magistralę komunikacyjną
- Możliwe jest wprowadzenie relacji pomiędzy masterem i followerem:
- Istnieje możliwość wprowadzenia offsetu pozycjonowania
- szczególnym przypadkiem synchronizacji jest układ tzw. wirtualnego mastera, w którym sygnał mastera generowany przez napęd zdefiniowany jako nadrzędny i podawany na kilka napędów podrzędnych jednocześnie
Praca zsynchronizowana w układzie wirtualnego mastera:
- do 5 różnych wałów synchronizuje swoją pozycję do wspólnego sygnału mastera generowanego przez wytypowaną przetwornicę.
- Sygnał mastera jest pojedynczym sygnałem impulsowym połączonym do wejścia nr 33 każdego napędu nadążającego.
- Każdy napęd nadążający posiada swoje własne indywidualne przełożenie (gear ratio) w stosunku do napędu nadrzędnego.
- Każdy napęd może mieć swój własny offset (przesunięcie) w stosunku do napędu nadrzędnego
Homing

Naturalnbe środowisko zastosowań FC-302 z wbudowanym IMC.
Funkcja homingu jest potrzebna do określenia punktu odniesienia dla fizycznej pozycji, w jakiej znajduje się maszyna po załączeniu zasilania, zarówno w układach w otwartej pętli sprzężenia zwrotnego, jak i w układach z wykorzystaniem enkodera inkrementalnego.
W FC-302 z wbudowanym IMC możemy wybierać spośród kilku rodzajów homingu, zarówno bez czujnika, jak i z jego wykorzystaniem. Funkcja ta może być stosowana do ustalenia pozycji zerowej maszyny w każdym cyklu jej pracy. Dzięki temu uzyskujemy stałą kalibrację układu, co zapewnia nam ciągłą wysoką dokładność wykonywanego ruchu. Jest to szczególnie ważne w odniesieniu do asynchronicznych silników indukcyjnych pracujących w otwartej pętli sprzężenia zwrotnego, gdzie mamy do czynienia z poślizgiem. Unikamy stopniowego sumowania się błędów wynikających choćby z luzów w przekładni, czy wspomnianego wcześniej poślizgu.
Przykładem jednej z ciekawszych funkcji homingu do wyboru jest choćby zdefiniowanie pozycji zerowej w zależności od wartości momentu i kierunku ruchu wału silnika.
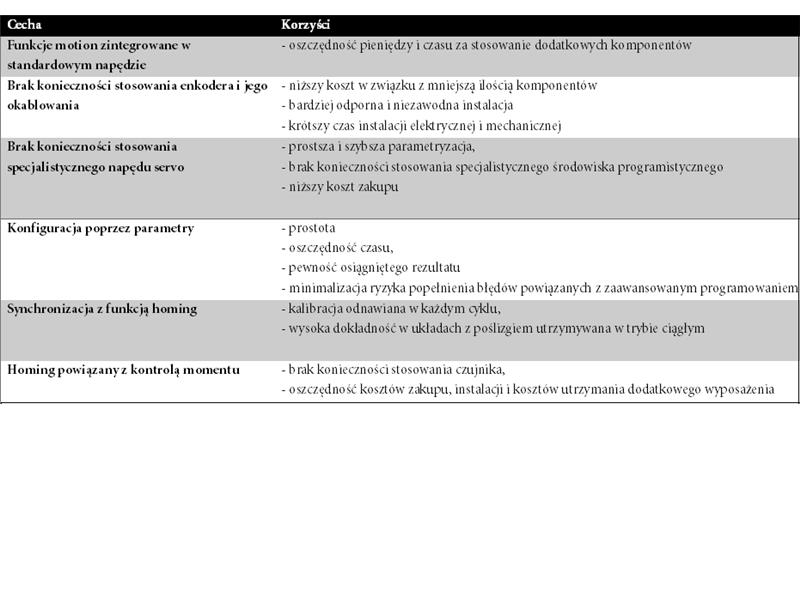
Podstawowe zalety IMC w stosunku do klasycznego napędu servo
Chcesz wiedzieć więcej, obejrzyj film: Integrated Motion Controller for VLT® AutomationDrive FC 302
- Autor:
- Rafał Rutkowski
- Dodał:
- Danfoss Poland Sp. z o.o.
Czytaj także
-

Kluczowa rola wycinarek laserowych w obróbce metali
Wycinarki laserowe zrewolucjonizowały przemysł obróbki metali, oferując niezwykłą precyzję i efektywność. Dowiedz się, dlaczego są one...
-

100% automatyzacji od jednego dostawcy
Firma SEW-Eurodrive, światowy lider techniki napędowej, rozszerzyła swoją ofertę o modułowy system automatyki MOVI-C® pozwalający na 100%...
-

-

-

-






