Powrót do listy wiadomości
Dodano: 2010-11-30 | Ostatnia aktualizacja: 2010-11-30
Podwodna nawigacja bazująca na fali spiralnej

Podwodna nawigacja bazująca na fali spiralnej
Dziś, nawigacja satelitarna stała się dzięki GPSowi powszechna. Z systemem tym współpracuje już wiele samochodów, a nawet telefonów komórkowych. Precyzja sięga dziś kilku metrów. A system Differential GPS (DGPS), który jako punkt odniesienia wykorzystuje stałą antenę, wskazuje pozycję wręcz z dokładnością do centymetra. Niestety, sygnał GPS jest bezużyteczny pod wodą. Z tego powodu, do nawigacji pod wodą wykorzystuje się obecnie różne akustyczne oraz inercyjne techniki. Te ostatnie bazują na przyspieszeniomierzach i żyroskopach, które określają pozycję oceniają ruch w odniesieniu do Ziemi. Jedną z technik akustycznych jest ‘long-baseline’, która wykorzystuje odległości od ustalonych źródeł dźwięki i określa pozycję w oparciu o czas jaki potrzebuje dźwięk by dotrzeć do odbiornika. Inną popularną techniką akustyczną jest ‘ultra-short baseline’. System taki wykorzystuje hydrofony, które mierzą pojedynczy przychodzący sygnał.
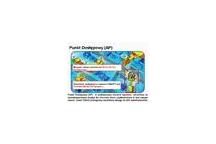
Nowa technika nawigacji różni się od technik ‘baseline’, gdyż sygnał przychodzący z punktu odniesienia sam z siebie różni się w zależności od pozycji, dzięki czemu potrzebny jest tylko jeden hydrofon.
Wyobraźcie sobie koncentryczne okręgi powstające na powierzchni wody po wrzuceniu doń kamyka. Każdy taki szczyt i dolina, to czoła fali i poruszają się one od środka z określoną prędkością. Pod powierzchnią wody, łatwo jest uformować kołowe czoła fali. Naukowcy znaleźli sposób, by stworzyć falę dźwiękową o innym kształcie czoła, a mianowicie spirali.
Może to zostać osiągnięte dzięki dwóm źródłom, z których jedno jest umieszczone na drugim. Gdy oba źródła emitowały sygnał jednocześnie, wyglądał on właśnie tak. Odległość pomiędzy kołowymi a spiralnymi czołami fali nie zmieniała się wzdłuż określonego kierunku. Dzięki temu, gdy hydrofon znajduje się w określonym miejscu w zasięgu punktu odniesienia, naukowcy mogą określić kąt położenia względem punktu odniesienia poprzez porównanie różnych czół fali. Technika ta wykorzystywana jest również w nawigacji lotniczej i nazywana jest VOR (VHF Omnidirectional Range). Różnica jest jednak taka, że VOR wykorzystuje fale radiowe, a nie dźwiękowe.
Bazując na tej koncepcji, naukowcy wykorzystali punkt odniesienia zbudowany przez Thomasa Howartha w Naval Undersea Warfare Center w Newport, Rhode Island. W celu przetestowania precyzji punktu odniesienia, przymocowano go około 3 metry pod powierzchnią wody w Naval Surface Warfare Center w Panama City, Florida. Zdalnie sterowana łódź pontonowa wyposażona została w hydrofon do określenia położenia przy pomocy fali spiralnej, a także antenę GPS, współpracującą z systemem DGPS. Łódź opłynęła zbiornik dookoła, a wyniki obu systemów zostały porównane. Pomimo, iż wyniki nowego systemu nie były aż tak dokładne jak DGPSu, mieściły się jednak w zakresie błędu pomiędzy 5 a15 stopniami.
Największą zaletą nowego systemu jest jego prostota. Potrzebny jest tylko jeden punkt odniesienia i jeden hydrofon. Koncepcja ta wydaje się być szczególnie interesująca w kontekście przyszłych całych rojów jednostek podwodnych.
(lk)
Kategoria wiadomości:
Z życia branży
- Źródło:
- Physorg

Komentarze (0)
Czytaj także
-

Jak zautomatyzować każdy proces przemysłowy?
Automatyzacja procesów jest kluczem do obniżania kosztów produkcji. Nie zawsze jest to proste, bo na proces przemysłowy składa się wiele...
-

Kluczowa rola wycinarek laserowych w obróbce metali
Wycinarki laserowe zrewolucjonizowały przemysł obróbki metali, oferując niezwykłą precyzję i efektywność. Dowiedz się, dlaczego są one...
-

-

-

-

-

-