Powrót do listy wiadomości
Dodano: 2005-05-16 | Ostatnia aktualizacja: 2005-05-16
RABBIT - chodzący robot

RABBIT - chodzący robot
Jessy Grizzle, który opracował teorie sterowania robotem, stwierdził, że algorytmy pozwalające robotowi nie tracić równowagi mogą znaleźć wiele zastosowań w medycynie, na przykład w rehabilitacji osób, które straciły zdolność chodzenia czy przy budowie protez.
Dwunożne roboty chodzące, stworzone do tej pory, to płaskostope, nienaturalnie człapiące lub tupiące maszyny, stwierdził Grizzle, profesor z University of Michigan.
Aby opracować RABBITa, naukowcy stabilizowali dwunożne roboty przeprowadzając żmudne ćwiczenia i pełne niepowodzeń eksperymenty, stwierdził Grizzle. Dzisiejsze roboty mają wielkie stopy aby uniknąć przewrócenia się, a ich algorytmy sterowania nie wywodzą się z naturalnych sposobów utrzymania równowagi – kontynuuje Grizzle. Jeżeli każesz takiemu robotowi chodzić na szczudłach albo chociażby na palcach natychmiast się przewróci.
RABBIT nie ma stóp. Jego nogi kończą się jak szczudła. ”Jeżeli budujesz robota który opiera się na dwóch punktach musisz zrozumieć jak różne jego elementy dynamicznie na siebie oddziaływują - albo on się przewróci.”
Teoria chodzenia opracowana na University of Michigan, która została opublikowana w ostatnim numerze Journal of Robotics Research, daje naukowcom analityczne metody, które pomogą w przewidywaniu jak robot będzie się poruszał, stwierdził Grizzle.
„Koncepcja stabilności została zredukowana do dwóch równań. Jeżeli rozumiesz dostatecznie dynamikę chodzenia i utrzymywanie równowagi możesz ją wyrazić matematycznie - możesz więc opisać jak robot ma się poruszać, co automatycznie daje algorytm sterowania. Taki algorytm działa od razu, od pierwszego kroku”, powiedział Gizzle. Jego osiągnięcia rzucają nowe światło na protetykę dla ludzi.
„ Nasza metoda analityczna jest bardzo efektywna – redukuje ilość eksperymentów, które trzeba przeprowadzać”, twierdzi Grizzle. ”Jeżeli weźmiesz wymiary pacjenta, jego wzrost, wagę, długości kości nóg itd. prawdopodobnie będzie można szybko dostosować protezę do pacjenta, a nie na odwrót, jak to ma miejsce obecnie.”
Inne aplikacje to chociażby rehabilitacyjne pomoce do chodzenia dla pacjentów z urazami rdzenia kręgowego, zaprojektowanymi do użytku domowego, które potrafią wspinać się po schodach, czy też roboty do eksploracji trudnego terenu.
RABBIT jest częścią francuskiego projektu ROBEA (Robotics and Artificial Entity), który łączy siedem laboratoriów i centrów badawczych z dziedzin mechaniki, robotyki i teorii sterowania. Maszyna znajduje się w Laboratoire Automatique w Grenoble.
Prace nad RABBITem Grizzle rozpoczął w 1998, kiedy to spotkał szefa projektu ROBEA podczas urlopu w Strasbourgu. Wniósł swoje doświadczenie w teorii sterowania – coś czego dotychczas brakowało w projekcie.
Kategoria wiadomości:
Z życia branży
- Źródło:
- ScienceDaily

Komentarze (0)
Czytaj także
-
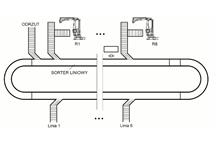
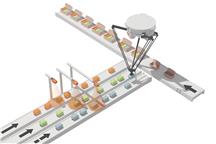
Robotyzacja linii produkcyjnej w branży FMCG - opis przypadku
Wspominałem już o korzyściach płynących z robotyzacji linii produkcyjnej , jednak teraz opiszę je na przykładzie z życia wziętym. ...
-

Kluczowa rola wycinarek laserowych w obróbce metali
Wycinarki laserowe zrewolucjonizowały przemysł obróbki metali, oferując niezwykłą precyzję i efektywność. Dowiedz się, dlaczego są one...
-

-

-

-

-

-