Czy planujesz wykorzystać sieć CsCAN do komunikacji sterowników Horner? Jeżeli tak, i dodatkowo ta komunikacja ma być wydajna, poznaj i wykorzystaj sieć CsCAN. Protokoły Modbus, Profibus DP, Profinet, EtherCAT, OPC nie są obce nikomu, kto w działa w branży automatyki. Modeli wymian danych jest wiele i wydawać by się mogło, że to, co jest ogólnie przyjęte jako standard, w zupełności wystarczy.
Okazuje się, że jednak tak nie jest i klienci często korzystają z sieci dedykowanych dla danego dostawcy. Przykładem może być tutaj Horner APG i jego CsCAN, który w większości dostarczanych urządzeń jest na wyposażeniu standardowym.
Standard CAN
Zanim zaczniemy analizę, do czego nadaje się CsCAN, warto powiedzieć, co było podstawą dla tego protokołu. Bazuje on na standardzie CAN, który był opracowany przez firmę Bosch w latach 80-tych ubiegłego wieku i przeznaczony był do zastosowań w przemyśle motoryzacyjnym. W oparciu o ten standard komunikuje się większość, jak nie wszystkie podzespoły w naszych samochodach.
Od pompy ABS, przez układy ASR na sterownikach pomp wtryskowych skończywszy.
Standard ten jest odporny na zakłócenia, szybki w komunikacji, dający szerokie możliwości wymiany danych, ale w klinicznej postaci jest bardzo trudny w konfiguracji i implementacji. Powyższe cechy zachęciły producentów do wykorzystania tego standardu w automatyce przemysłowej, opakowując go dodatkową konfiguracją, która ma na celu ułatwić jego obsługę przy zachowaniu jego unikalnych cech. CAN jako standard sieci jest bazą dla między innymi takich sieci jak CsCAN, CANopen, DeviceNet czy j1939.
Peer-to-peer. Tak najprościej opisać CsCAN
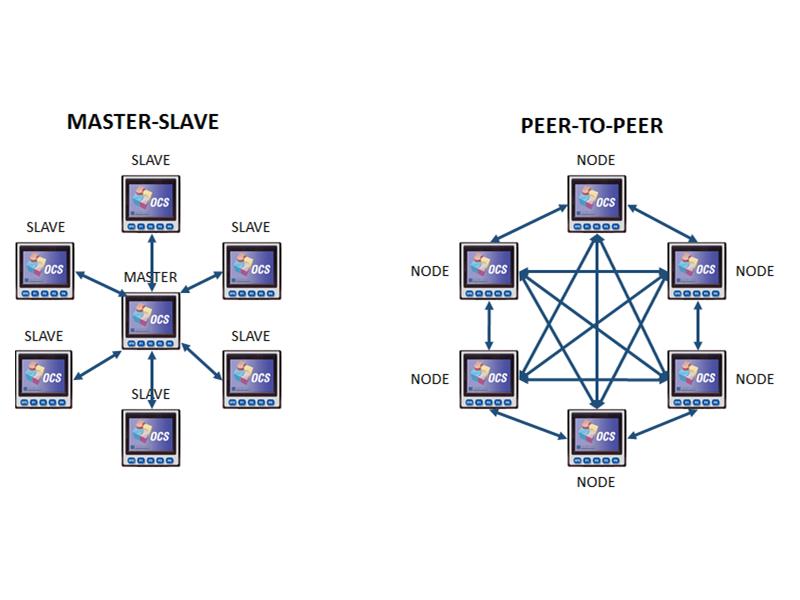
To co w sposób znaczący odróżnia CsCAN od innych sieci przemysłowych to komunikacja peer-to-peer (równy z równym). Oznacza to, że nie ma wyodrębnionej jednostki nadrzędnej zarządzającej komunikacją, dlatego należy do grupy magistral typu multi-master.
Komunikacja ma charakter rozgłoszeniowy, ponieważ komunikaty nadawane na magistralę są odbierane przez wszystkie urządzenia pracujące w sieci. Taki model wymiany danych ma jedną kluczową przewagę nad sieciami Master-Slave (np. Modbus, Profibus) – komunikacja nie wymaga urządzenia MASTER do zarządzania siecią. Ma to bardzo duże znaczenie w przypadku łączenia kilku urządzeń ze sobą.
W modelu peer-to-peer każdy może inicjować komunikację i udostępniać swoje dane innym urządzeniom – wtedy, kiedy to konieczne i zgodnie z ustalonym priorytetem. Dane mogą być odbierane przez wszystkie urządzenia (broadcast), przez kilka określonych urządzeń (multicast) lub przez jedno dedykowane urządzenie (unicast). Dzięki temu nie trzeba zarządzać komunikacją jak na przykład w Modbus, gdzie to urządzenie MASTER żąda danych od urządzeń SLAVE, a SLAVE udostępnia je tylko na żądanie MASTER.
Jak można się domyślić, taki model komunikacji ma 2 duże wady:
1. wyłączenie/awaria urządzenia MASTER całkowicie rozłącza komunikację i żadne dane nie są wymieniane pomiędzy urządzeniami w sieci,
2. SLAVE może wysłać dane tylko wtedy, gdy zapyta go MASTER. A więc w dużych sieciach, gdzie pracuje wiele urządzeń, każdy SLAVE musi czekać na swoją kolejkę odpytania, co wydłuża komunikację. Jest to szczególnie uciążliwe w systemach podatnych na zakłócenia, gdzie MASTER musi kilka razy ponowić zapytanie do tego samego SLAVE, aby prawidłowo odebrać od niego paczkę danych. To bardzo wydłuża kolejkę odpytania całej sieci urządzeń.
Najważniejsze cechy sieci CsCAN
Komunikacja w CsCAN zorganizowana jest w postaci pakietów. Każdy z nich może mieć maksymalnie 8 bajtów danych i posiada nadany unikalny identyfikator wykorzystywany podczas wymiany danych. CsCAN posiada zaimplementowany mechanizm automatycznej obsługi dostępu do magistrali oraz sprzętową obsługę błędów. Dzięki temu konfiguracja sieci jest bardzo prosta.
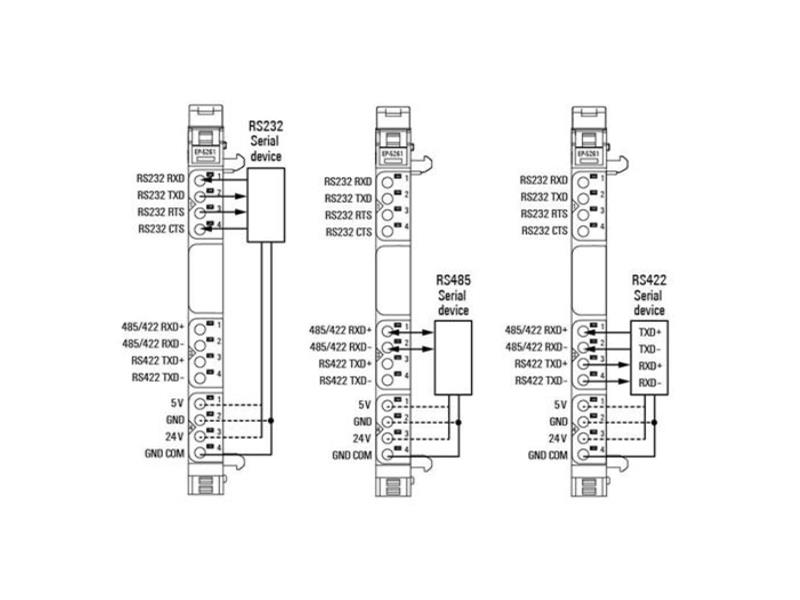
Magistrala komunikacyjna CsCAN wykorzystuje dwuprzewodową skrętkę i może pracować z maksymalną prędkością do 1 mbps na dystansie do 40 metrów.
Wraz ze zwiększeniem dystansu komunikacji spada prędkość maksymalna, ale dzięki wykorzystaniu repeaterów sygnału, komunikację można realizować na magistrali o długości do 2000 metrów, a w ramach jednej sieci może pracować do 255 urządzeń.
CsCAN charakteryzuje się dużą niezawodnością i odpornością na zakłócenia. Uzyskano to poprzez nadawanie danych w postaci napięciowego sygnału różnicowego oraz dzięki sprzętowej obsłudze protokołu i kontroli błędów.
Zasada działania magistrali CsCAN
Zasada działania komunikacji jest bardzo prosta. Każde urządzenie pracujące na sieci CsCAN ma unikalny adres Node ID, a w jednej sieci może pracować maksymalnie 255 urządzeń. Wymiana danych zorganizowana jest w postaci komunikatów, a każdy komunikat ma przydzielony identyfikator, który określa priorytet dostępu do magistrali zgodnie z zasadą „im mniejsza wartość liczbowa, tym większy priorytet".
Warto podkreślić, że identyfikator nie jest przypisany do urządzenia, lecz do komunikatu i może mieć wartość stałą lub być modyfikowany z poziomu drabinki programu. Dzięki temu w bardzo łatwy sposób przy pomocy jednego bloku możemy sterować komunikacją tak, aby dane o najwyższym priorytecie w pierwszej kolejności były wysyłane na sieć.
Dostęp do magistrali jest przyznawany metodą dominacji bitowej, która polega na tym, że urządzenia badają stan magistrali czekając na możliwość wysłania własnego komunikatu. Jeśli magistrala nie jest zajęta, zaczynają nadawać. W przypadku podjęcia próby równoczesnego nadawania przez kilka urządzeń, dostęp do łącza otrzyma ten, który ma do wysłania komunikat o najwyższym priorytecie.
Komunikat trafia do wszystkich urządzeń pracujących w sieci CsCAN, a o sposobie wykorzystania danych decyduje urządzenie docelowe, do którego dotarł komunikat. Otrzymane dane może odebrać i zapisać we własnej pamięci rejestrowej lub nie robić z nimi nic.
Obsługa komunikacji CsCAN z poziomu programu sterującego
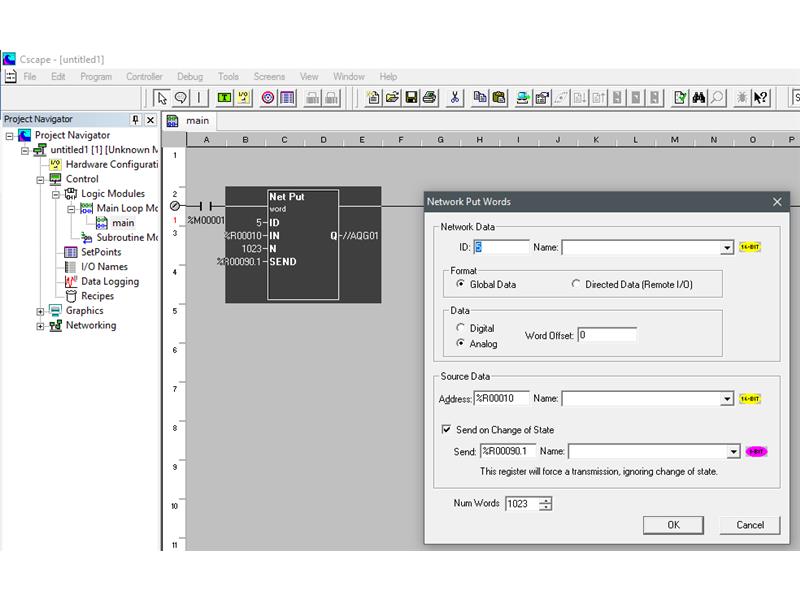
Cała konfiguracja wymiany danych opiera się o gotowe bloki funkcyjne, które uruchamiane są z poziomu drabinki programu.
W oprogramowaniu narzędziowym Cscape dostępnych jest 6 dedykowanych bloków do obsługi komunikacji CsCAN. Są to:
- Net Get – Wyślij dane na sieć CsCAN,
- Net Put – Pobierz dane z sieci CsCAN,
- Net Get HB – Wyślij na sieć znacznik HeartBit. Informacja o tym, czy inne urządzenie na sieci jest aktywne,
- Net Put HB – Pobierz z sieci znacznik HeartBit. Informacja o tym, że urządzenie wysyłające znacznik jest w sieci aktywne.
- Net Get Remote IO – wyślij sygnały IO do oddalonych układów wejść/wyjść.
- Net Put Remote IO – pobierz sygnały IO z oddalonych układów wejść/wyjść.
Każdy z tych bloków posiada konfigurowane atrybuty w postaci identyfikatora komunikatu, adresu docelowego danych, ilości danych, które należy odczytać/zapisać oraz warunki wysłania danych (bit wyzwalający, wysyłanie w chwili zmiany stanu wartości). Drabinka daje duże możliwości sterowania komunikacją, a atrybuty bloków funkcyjnych mogą być modyfikowane w czasie trwania programu sterującego pozwalając na zmianę identyfikatorów komunikatów (a tym samym priorytetu komunikacji), ilość danych wysyłanych, adresu źródłowego i docelowego dla przesyłanych danych.
Trzy najpopularniejsze powody wykorzystania magistrali CsCAN
Powód 1: Szybka komunikacja kilku sterowników Horner APG między sobą
To jeden z najpopularniejszych sposobów korzystania z sieci CsCAN. W systemach, gdzie kilka urządzeń ma współpracować ze sobą, model peer-to-peer jest najbardziej optymalny w celu szybkiej i niezależnej wymiany danych. Urządzenia spięte ze sobą w jedną sieć mogą się łatwo komunikować i wymieniać między sobą dane z szybkością do 1 mbps.
Powód 2: Prostsza lokalna lub oddalona rozbudowa sterowników Horner APG.
Moduły rozszerzeń SmartStix IO oraz Smart-Block IO pozwalają na obsługę większej ilości sygnałów wejść/wyjść w systemie sterowania. Rozbudowa sterowników Horner APG dzięki temu jest bardzo prosta, a wbudowane wizardy konfiguracyjne w Cscape powodują, że jest również bardzo szybka. Warte podkreślenie jest również to, że pojedyncze układy wejść/wyjść oddalonych mogą być źródłem danych dla kilku sterowników pracujących w sieci.
Powód 3: Możliwość zdalnego programowania sterowników pracujących w sieci CsCAN
Wystarczy, że jeden sterownik będzie miał dostęp do komputera z oprogramowaniem narzędziowym, abyśmy mieli możliwość programowania dowolnego urządzenia pracującego w sieci CsCAN. Dzięki temu zarządzanie siecią rozproszonych urządzeń z jednego miejsca jest możliwe i łatwe. W oprogramowaniu Cscape wystarczy wskazać Node ID urządzenia, do którego chcemy się podłączyć, aby mieć możliwość zdalnego programowania i serwisu urządzenia.
- Autor:
- Piotr Adamczyk
- Źródło:
- www.astor.com.pl/poradnikautomatyka
- Dodał:
- ASTOR Sp. z o.o.
Czytaj także
-

Komunikacja w sieci CsCAN | Kurs programowania PLC od podstaw | Odc. 17
Chcesz nauczyć się programować sterowniki PLC? Wszystkie odcinki kursu, bezpłatne oprogramowanie oraz dodatkowe materiały znajdziesz na...
-

Kluczowa rola wycinarek laserowych w obróbce metali
Wycinarki laserowe zrewolucjonizowały przemysł obróbki metali, oferując niezwykłą precyzję i efektywność. Dowiedz się, dlaczego są one...
-
-

-

-

-

-







