
a sterownikiem Astraada ONE – skanerem – w protokole komunikacyjnym Software Ethernet IP – odc.2
Z tego odcinka kursu dowiesz się:
- o poszczególnych opcjach menu aux oraz jak je znaleźć na teach pendancie robota Kawasaki,
- jak skonfigurować porty i sygnały na robocie Kawasaki,
- o konfiguracji komunikacji pod sterownik PLC Astraada One,
- jak sprawdzić poprawność działania połączenia.
1. – w protokole komunikacyjnym Software Ethernet IP – odc.12. Konfiguracja komunikacji pomiędzy robotem Kawasaki z kontrolerem E – adapterem – a sterownikiem Astraada ONE – skanerem – w protokole komunikacyjnym Software Ethernet IP – odc.2
3. Konfiguracja komunikacji pomiędzy robotem Kawasaki z kontrolerem F – skanerem – a sterownikiem Astraada ONE – adapterem – w protokole komunikacyjnym Software Ethernet IP – odc.3
4. Konfiguracja komunikacji pomiędzy robotem Kawasaki z kontrolerem F – adapterem – a sterownikiem Astraada ONE – skanerem – w protokole komunikacyjnym Software Ethernet IP – odc.4
5. Konfiguracja komunikacji pomiędzy robotami Kawasaki w protokole Komunikacyjnym Ethernet IP – odc.5
6. Konfiguracja komunikacji pomiędzy robotem Kawasaki (skanerem) a sterownikiem Horner (adapterem) w protokole komunikacyjnym Ethernet IP – odc.6
7. Konfiguracja więcej niż jednego urządzenia typu adapter w komunikacji z Robotem Kawasaki (skanerem) – w protokole Ethernet IP – odc.7
1. Opis poszczególnych opcji menu aux oraz jak znaleźć menu na teach pendancie robota Kawasaki
Menu AUX FUNCTION uruchamiasz z poziomu teach pendant'a. Znajdują się w nim podstawowe ustawienia robota Kawasaki. Menu to podzielone jest na 8 części:
1. Program Conversion
2. Save/Load
3. Aux. Data Setting
4. Basic Setting
5. Advanced Setting
6. Input/Output Signal
7. Log Function
8. System
Wszystkie ustawienia dotyczące komunikacji w tym protokole znajdują się w menu 6. Input/Output Signal.
Poniżej podano również szybkie odnośniki do danych stron w formie np. (AUX.0609-20-1). Aby skorzystać z tej opcji wybierz przycisk R, gdy jesteś w widoku ogólnym.
Później wpisz daną komendę do okna:
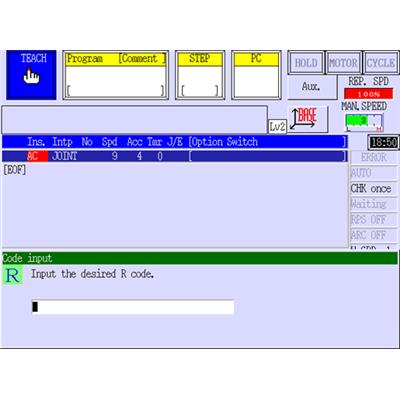 Widok ogólny na teach pendancie robota Kawasaki po wciśnięciu R
Widok ogólny na teach pendancie robota Kawasaki po wciśnięciu R
Aby otworzyć menu naciśnij na klawiaturze teach pendant'a przycisk MENU.
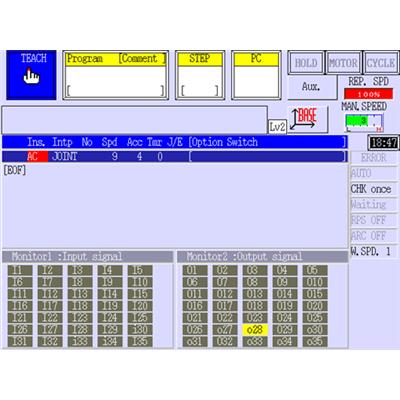 Widok ogólny na teach pendancie robota Kawasaki
Widok ogólny na teach pendancie robota Kawasaki
Wybieraj opcje za pomocą strzałek.
Następnie zatwierdź wybór przyciskiem ENTER:
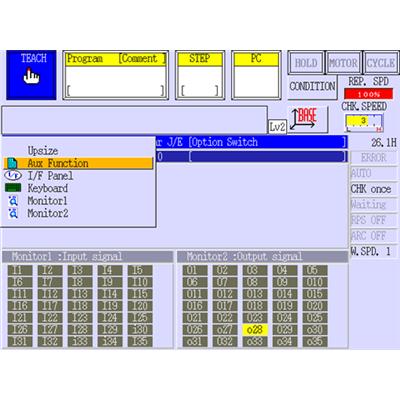 Widok ogólny na teach pendancie robota Kawasaki po wciśnięciu MENU
Widok ogólny na teach pendancie robota Kawasaki po wciśnięciu MENU
Wybierz opcję 6. Input/Output Signal.
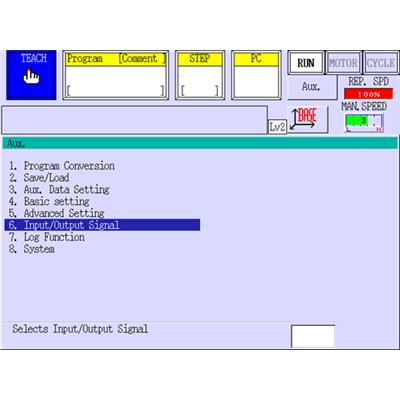 Widok menu aux na teach pendancie robota Kawasaki
Widok menu aux na teach pendancie robota Kawasaki
2. Konfiguracja portów i sygnałów
1. Ustaw porty dla robota Kawasaki i sterownika PLC Astraada One. (AUX.0608-2)
 Alokacja sygnałów na robocie Kawasaki
Alokacja sygnałów na robocie Kawasaki
2. Ustaw adresy IP pamiętając, że tylko port 2 na robocie Kawasaki pozwala na obsługę komunikacji ze sterownikiem. (AUX.0608-9-1)
 Ustawienie adresu portu 2 na robocie Kawasaki
Ustawienie adresu portu 2 na robocie Kawasaki
3. Przypisz odpowiednią liczbę sygnałów, możesz przypisać ich więcej i nie wykorzystać ich, natomiast nie możesz przypisać mniej niż wykorzystasz. (Poniższe przypisanie jest przykładowe, dla różnych urządzeń będzie różniło się od tego w zależności od parametrów). (AUX.0611)
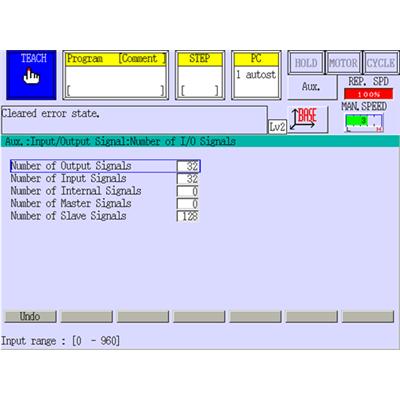 Ustalenie liczby sygnałów na robocie Kawasaki
Ustalenie liczby sygnałów na robocie Kawasaki
4. Przypisz sygnały. (AUX.0608-1)
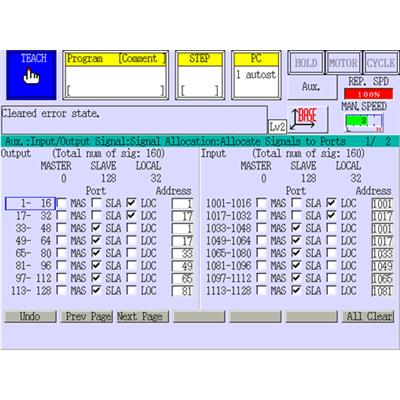 Przypisanie sygnałów na robocie Kawasaki 1
Przypisanie sygnałów na robocie Kawasaki 1
 Przypisanie sygnałów na robocie Kawasaki 2
Przypisanie sygnałów na robocie Kawasaki 2
5. Ustal sekwencję sygnałów. (AUX.0608-3)
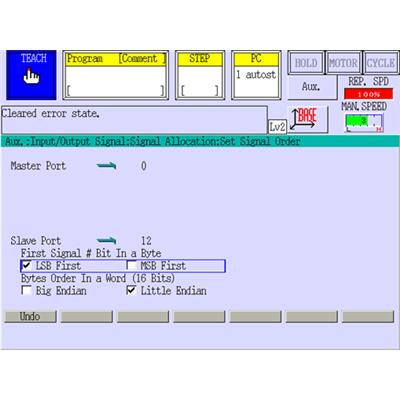 Ustalenie sekwencji sygnałów na robocie Kawasaki
Ustalenie sekwencji sygnałów na robocie Kawasaki
Robot Kawasaki może obsłużyć do 3 urządzeń – adapterów, samemu będąc scannerem lub 1 urządzenie – scanner, gdy sam jest adapterem.
3. Konfiguracja komunikacji robota Kawasaki pod sterownik PLC Astraada One.
1. Aby sterownik danego producenta mógł współpracować z robotem, ustaw komunikację zgodnie z zaleceniami producenta. Najważniejsze jest poprawne ustawienie adresów IP oraz instancji.
Adres IP sterownika robot uzyskuje samoczynnie. (AUX.0608-9-3)
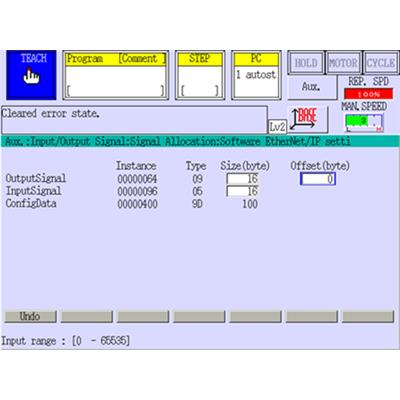 Ustawienie offsetu i wielkości ramki na robocie Kawasaki
Ustawienie offsetu i wielkości ramki na robocie Kawasaki
Uwaga: Na powyższym zdjęciu rozmiar ramki to 16 bajtów wyjść x 16 bajtów wejść, czyli 128 x 128 w bitach. To ustawienie zrobione niewłaściwie jest częstą przyczyną błędu komunikacji
2. Przykładowy program w Codesys. Program ten jest „pusty", jest w nim jedynie zdefiniowana komunikacja z robotem. Widok ogólny:
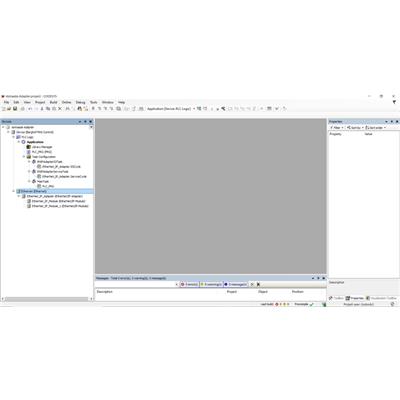 Widok ogólny Codesys
Widok ogólny Codesys
Ustawienia w programie dla sterownika PLC Astraada napisanym w środowisku programistycznym Codesys i ustawienie tam komunikacji jako scanner wraz z ramką 16×16 bajtów (czyli 128×128 bitów).
Zakładki tworzysz naciskając prawym klawiszem myszy na element Ethernet, a następnie wybierając opcję: Add Device – Fieldbuses – EtherNet/IP Scanner
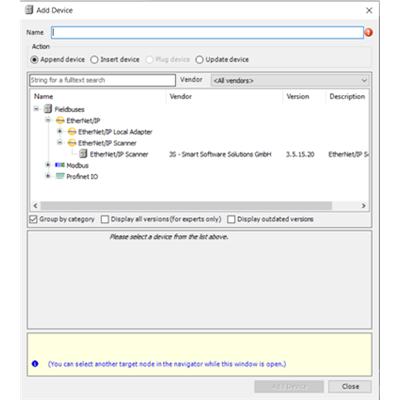 Okno Add Device
Okno Add Device
Okno device powinno zawierać...
Zobacz pełną wersję artykułu na Poradniku Automatyka >>>
Zobacz pozostałe odcinki kursu >>>
- Autor:
- Jonasz Sobaniec
- Źródło:
- Poradnik Automatyka
- Dodał:
- ASTOR Sp. z o.o.
Czytaj także
-

Konfiguracja komunikacji pomiędzy robotem Kawasaki z kontrolerem E – skanerem
Z tego artykułu dowiesz się: o poszczególnych opcjach menu aux oraz jak je znaleźć na teach pendancie robota Kawasaki, , jak skonfigurować...
-

Kluczowa rola wycinarek laserowych w obróbce metali
Wycinarki laserowe zrewolucjonizowały przemysł obróbki metali, oferując niezwykłą precyzję i efektywność. Dowiedz się, dlaczego są one...
-

-
-

-

-

-








